Servomotores
Un servomotor nos permite posicionar su eje un ángulo determinado entre 0 y 180º. Su conexión a Arduino se muestra en la figura: los dos pines de alimentación (+5 y GND) y el pin de control que debe ser conectado a una salida PWM.

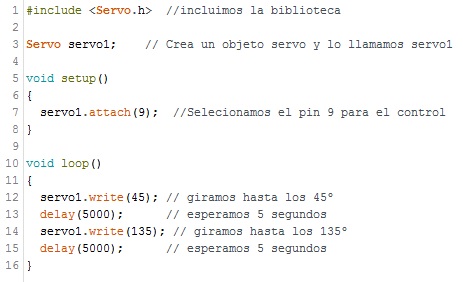
Para programarlo utilizaremos la biblioteca "servo.h". En el ejemplo siguiente posicionamos el eje del servo en 45º, esperamos 5 segundos, volvemos a mover el servo a 135º, esperamos 5 segundos y repetimos el ciclo.
Los servos de rotación continua nos permiten controlar su velocidad y el sentido de giro. En este caso 0º provocaría el giro del motor a máxima velocidad en un sentido, con un valor de control de 180º giraría a máxima velocidad en sentido contrario y con 90º se pararía (no obstante, es conveniente hacer algunas pruebas para fijar estos valores). Ángulos intermedios lo harían girar a velocidades inferiores.
Estos servos de rotación continua se pueden utilizar para construir pequeños vehículos sustituyendo a los motores de corriente continua. Su programación es muy sencilla, no suele ser necesaria una batería de 6v adicional, son compactos y mantienen un buen par en todas las velocidades.
Actividades
Obra publicada con Licencia Creative Commons Reconocimiento No comercial Compartir igual 4.0